マイコンボードでモータを制御するには
モータ原理
モータは磁石の磁力で回ります。
・ 磁石の特性
二つの磁石がある場合 異なる磁極 N と S 引き合う
同じ磁極 S と S 、N と N 反発
・ フレミングの法則
コイルに電流が流れると磁界が発生し、このコイルが磁石になります。
・ 磁石の特性
二つの磁石がある場合 異なる磁極 N と S 引き合う
同じ磁極 S と S 、N と N 反発
・ フレミングの法則
コイルに電流が流れると磁界が発生し、このコイルが磁石になります。
永久磁石 と コイル(磁石)の組み合わせることでモータになります。
ブラシ付モータ 永久磁石 が固定(外側) コイル が回転(内側)
ブラシレスモータ コイル が固定(外側) 永久磁石 が回転(内側)
ブラシ付モータ 永久磁石 が固定(外側) コイル が回転(内側)
ブラシレスモータ コイル が固定(外側) 永久磁石 が回転(内側)
モータとは電気を利用して回転運動にする機械のことをいいます。
電気エネルギ →変換→ 機械エネルギ
電気エネルギ →変換→ 機械エネルギ
モータを分類すると
- 直流電流 か 交流電流
- 回転運動 か 直線運動
- 制御用 か 高出力
などの分類方法がありますが、モータを使用したコンピュータ(マイコンボード)制御は玩具から自動車や新幹線などまであらゆる分野で使われています。と言うことは全てのモータは制御可能と言うことになります。モータの特徴を理解してロボット技術に活かしましょう。
- DCモータ
駆動用
- ステッピングモータ
回転角度を制御
- サーボモータ
回転角度を制御
などがあります。原理や用途について説明します。
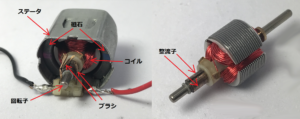
DCモータの原理
① ブラシ(電極)から回転子の整流子に電流が流れます。
② 整流子からコイルに電流が流れると磁力が発生します。(フレミングの左手の法則)
③ ステータ(固定子)に固定している永久磁石に反応して固定子が回転します。
① ブラシ(電極)から回転子の整流子に電流が流れます。
② 整流子からコイルに電流が流れると磁力が発生します。(フレミングの左手の法則)
③ ステータ(固定子)に固定している永久磁石に反応して固定子が回転します。
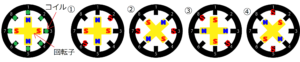
○ ステッピングモータ
ステッピングモータの原理
・ 外側のコイルに電流を流し、回転子の磁石が引かれる
・ 回転子が動いたらコイルの電流をOFF
・ 進む方向のコイルをON
1ステップ角度ずつ進んで回転するモータをステッピングモータといいます。
・ 回転子が動いたらコイルの電流をOFF
・ 進む方向のコイルをON
1ステップ角度ずつ進んで回転するモータをステッピングモータといいます。
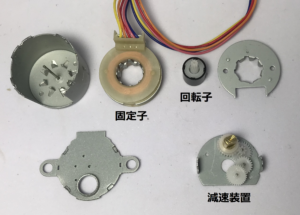
今回使用したステッピングモータは
- ユニポーラ ステッピングモータ 28BYJ-48
- 主な仕様 ・ギア比:1/64
・励磁方式:2相ユニポーラ
・ステップ角:5.625°
・出力軸1回転のステップ数:2048(2相励磁)
・定格電圧:5V
・直流抵抗:約22Ω
※2相励磁で無負荷の最高回転数は4秒で1回転
〇 1回転4秒と速度は遅いですが、移動させたいステップ数を入れるとそのステップ数だけの角度を回転できます。
例えば 90度動かしたいなら
2048 ÷ 4 =512
512 ステップ 移動すると90度の角度が移動できます。
リンク
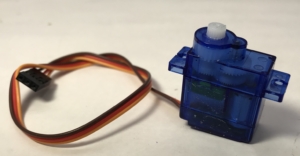
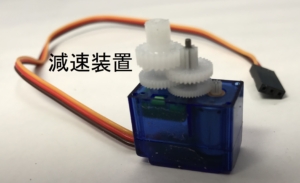
○ サーボモータ
サーボモータの原理
サーボモータはモータ軸の回転角度/回転速度を回転検出器(エンコーダ)で検出し、モータドライバへ フィードバックします。このフィードバックと先にモータドライバ入力される制御用の情報の差が0になるよう振舞います。 また、ステッピングモータに比べ細かな制御が行え、高速回転時にも高いトルクを維持できます。


〇 DCモータ
駆動用 車両で使われる物
ミニ四駆
駆動用 車両で使われる物
ミニ四駆
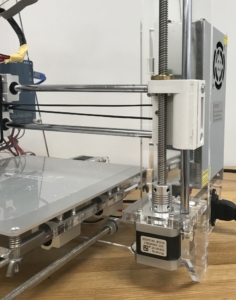
○ ステッピングモータ
回転角度を制御
ボルトとセットで位置決め用
3Dプリンタ などで
○ サーボモータ
回転角度を制御
操舵のコントロール
関節の制御