DCモータ駆動の制御用車を作ろう
私の子供時代、プラモデルを組み立てたり「バルサ材」を用いて夏休みの宿題でジープを作った記憶があります。特にバルサ材は加工は容易な反面強度的はにはあまり強いものではありませんでした。
これから制御について学ぶ上で、センサとアクチュエータ(モータ)の連動の実験等で活用するのに、使い勝手が良いDCモータ駆動の車について考えてみましょう。
これから制御について学ぶ上で、センサとアクチュエータ(モータ)の連動の実験等で活用するのに、使い勝手が良いDCモータ駆動の車について考えてみましょう。
自動車の駆動方式なら、下記の方式になります。

| FF | Front engine Front drive Front wheel drive |
フロントエンジン・前輪駆動 |
| FR | Front engine Rear drive Rear wheel drive |
リアエンジン・後輪駆動 |
| RR | Rear engine Rear drive | リアエンジン・後輪駆動 |
| MR | Mid-Ship | エンジンが前後の車輪の間 |
| 4WD | Four Wheel Drive | 四輪駆動 |
※ フロント・リアは運転者に対して前後の位置関係になります。
MRは前輪と後輪の荷重配分は50:50になる用にエンジンを配置
特にフロントエンジンの場合は
フロントミッドシップ と言います。
4WDはエンジンの位置関係は問いません。
自動車の分類なら5種類になりますが、自作で安価で構造が簡単な自動制御で扱う車を作成する場合は FF ・ RR のどちらかになると思います。
エンジンの代わりにモータに代わり前後進だけなら簡単ですが、操舵が可能として、操舵の機能も持つ車両とします。
RRの構造
・前輪は操舵 サーボモータ 1個
・後輪は前後進用 モータ 1個
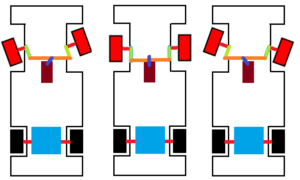
FFの構造
・前輪は操舵 + 走行用 モータ 2個
2つのモータの回転方向や速度を変えることにより操舵が可能になります。
・後輪は3パターンを検討しました。
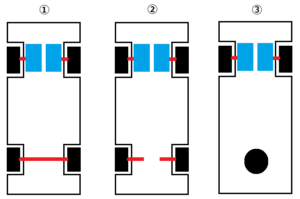
① 両後輪をシャフトで繋ぐ
前後進の動作なら構いませんが、右左折の時内側のタイヤと外側のタイヤでは進む距離が異なるために動きがギゴチなくなるためLSD(自動差動制限装置)をつけることによりスムーズな動きになります。
② 後輪は左右のタイヤを分離してフリーに
フリーにすることにより右左折の時内側のタイヤと外側のタイヤは解消します。
③ 後輪はボールキャスター
ボールキャスターを1個ないし2個を配置することにより小回りが出来ます。
まとめ
駆動方法は FF 左右が分離した駆動方式を採用
後輪はボールキャスター1個
機動性を優先しました。
後輪はボールキャスター1個
機動性を優先しました。

![]()
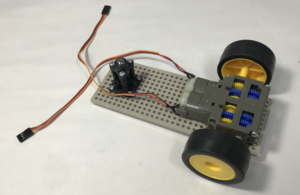
車体はバルサ材でも構いませんが、後にセンサー等を加える事を考慮し ユニバーサルプレートにしました。プッシュリベット18個が必要ないならNo98を2枚購入した方が安くなります。
タイヤは50mm程度のもので色々なタイヤのパターンがありますからお好きなタイヤをお選び下さい。因みに私は溝がなく接地面が大きいタイヤを選びました。
タイヤは50mm程度のもので色々なタイヤのパターンがありますからお好きなタイヤをお選び下さい。因みに私は溝がなく接地面が大きいタイヤを選びました。
| No | 部 品 |
| ① | No.157 ユニバーサルプレート 2枚セット |
| No.98 ユニバーサルプレートセット | |
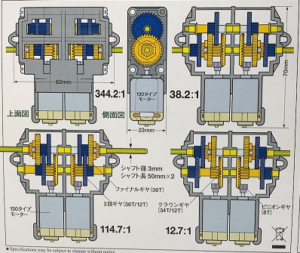
| ② | No.168 ダブルギヤボックス 左右独立4速タイプ |
| ③ | No.144 ボールキャスター 2セット入 |
| ④ | スタジオミュウ 50mmタイヤセット |

リンク
① ギヤボックスの組み立て
ギヤ比は4種類から選べますが、ギヤ比が一番高い334.2:1を選択しました。
速度を遅くする事でセンサーための実験等に使用出来ます。
ギヤを組立後モータを取れ付けずにシャフトを持って回すとスムーズに動く事を確認して下さい。スムーズに動けば組み立ては成功です。
ボールキャスターは35mmを選択
速度を遅くする事でセンサーための実験等に使用出来ます。
ギヤを組立後モータを取れ付けずにシャフトを持って回すとスムーズに動く事を確認して下さい。スムーズに動けば組み立ては成功です。
ボールキャスターは35mmを選択
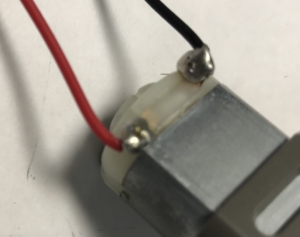
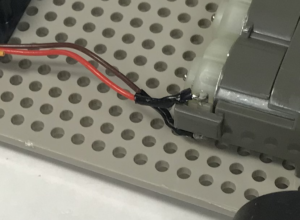
電線でモーター繋ぐ時、モータの電極が弱いため簡単に壊れます。そこでハンダで取り付け後熱収縮チューブを付けると教材でも使えます。
参考例
台車にスペーサを付けてプレートを乗せるとマイコンボード等が乗ります。

Arduino を取り付ける時、Arduinoのケースをトリル時、ケースの方が若干、穴が小さいため、3nnのドリルで大きめに開け方が、旨く取り付けられました。
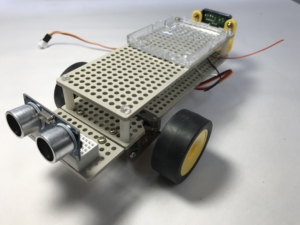
Arduino を取り付ける時、Arduinoのケースをトリル時、ケースの方が若干、穴が小さいため、3nnのドリルで大きめに開け方が、旨く取り付けられました。
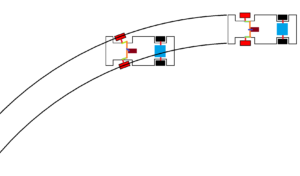
このように走ります。今後、センサーを使った実験も出来ます。
![]()