LESSON 028
赤外線障害物回避センサモジュール で物体を感知
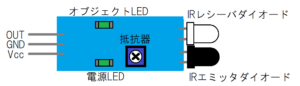
○ 光が当たると起電力が発生するフォトダイオード用いた赤外線障害物回避センサモジュールを説明します。
○ 赤外線(IR = Infrared)センサーには「熱型」と「量子型」の動作原理の2種類に分けられます。
-
-
-
- 熱型は、赤外線を熱に変換し、抵抗変化や熱起電力などを利用したセンサー
熱起電効果
焦電効果
熱電対効果
ポロメータ型
- 量子型は、光導電効果や、光起電力効果を利用したセンサー
光起電力効果 フォトダイオード
フォトトランジスタ
フォトIC
太陽電池
光伝導効果
光電子放出効果
- 熱型は、赤外線を熱に変換し、抵抗変化や熱起電力などを利用したセンサー
-
-
○ IRエミッタダイオードから赤外線を送信し、障害物に反射した赤外線がIRレシーバダイオードで受信します。
-
-
-
- センサーの検出距離は固定
指定した検出距離になれば、障害物が検出されます。
モジュール検出距離2〜30cm、検出角度35 °
抵抗器(ポテンショメータ)による検出距離を調整
ポテンショメータを時計回り 検出距離 短い
ポテンショメータを反時計回り 検出距離 長い
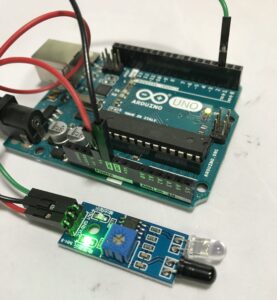
- このセンサーは単独でも機能します。
指定した検出距離以下になれば、オブジェクトLEDが点灯します。
- センサーの検出距離は固定
-
-
リンク
目 次
-
- 構成部品
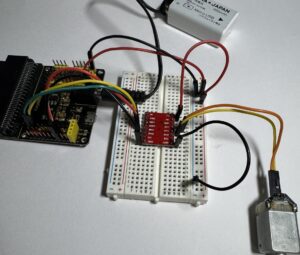
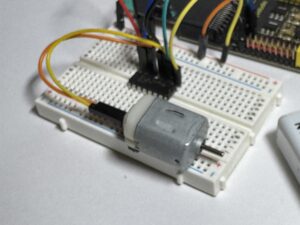
- 配線図
- スケッチ
- 解説
- 結果
- まとめ
構成部品
Arduino
USBケーブル
ブレッドボード
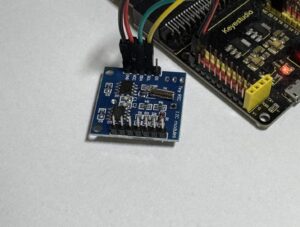
赤外線障害物回避センサモジュール
ジャンパー線
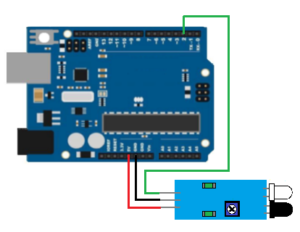
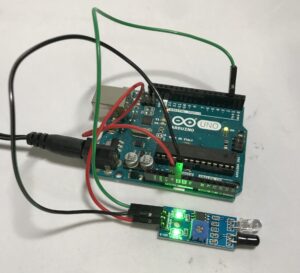
配線図
 GPIO 2 ⇒ OUT
GPIO 2 ⇒ OUT
GND ⇒ GND
5V ⇒ VCC
 GPIO 2 ⇒ OUT
GPIO 2 ⇒ OUT GND ⇒ GND
5V ⇒ VCC
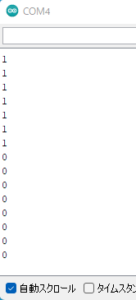
スケッチ《 test023》
const int OUT_data = 2;
int out_D;
void setup() {
pinMode(OUT_data, INPUT);
Serial.begin(9600);
}
void loop() {
out_D =digitalRead(OUT_data);
Serial.println(out_D);
delay(200);
}リンク
解説

![]()
まとめ
○ 赤外線障害物回避センサモジュールは指定した距離になったら反応します。用途としては自動泡ハンオードソープ等で手を近づけたらセンサーが反応してソープが出る仕掛け等で使われています。
○ Arduino を 学ぶ上で書籍やWebpageを参考に作っていますが、私なりに噛み砕いて書いているつもりですが、判らない点がありましたら連絡下さい。

![]()