![]()
![]()
![]()
![]() LESSON 65
LESSON 65
micro:bit DRV8833でモータを動かす
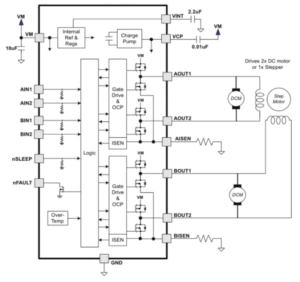
モータドライバICのDRV8833を用いてDCモータを制御します。2つのモータを制御する事が出来ます。また、DCモータの回転数をPWM制御が可能になります。
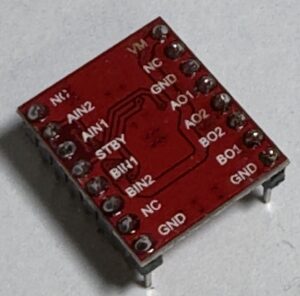
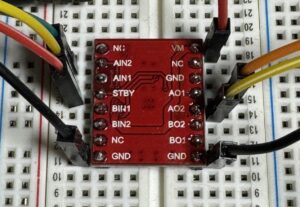
ANI1:AO1の論理入力制御ポート レベルは0〜5V
AIN2:AO2のロジック入力制御ポート レベルは0〜5V
BNI1:BO1の論理入力制御ポート レベルは0〜5V
BIN2:BO2のロジック入力制御ポート レベルは0〜5V
micro:bitでは3.3Vの出力しかなく、最大で66%の出力しか出せません。
ANI1:AO1の論理入力制御ポート レベルは0〜5V
AIN2:AO2のロジック入力制御ポート レベルは0〜5V
BNI1:BO1の論理入力制御ポート レベルは0〜5V
BIN2:BO2のロジック入力制御ポート レベルは0〜5V
micro:bitでは3.3Vの出力しかなく、最大で66%の出力しか出せません。
DRV8833は2つのモータを制御やステッピングモーターも制御できます。
モータ電源とロジック電源ピンが分離されています。
モータ電源 2~11V
ロジック電源 2~7V
DRV8833はL293Dより高出力のモーターを制御できます。
リンク
リンク
目 次
-
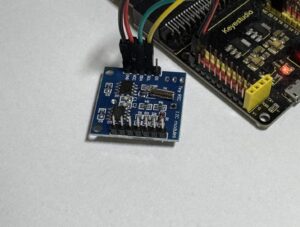
- 構成部品
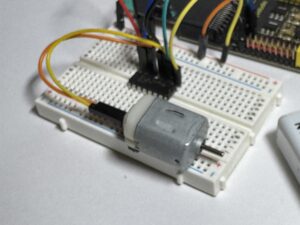
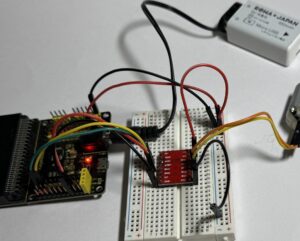
- 配線図
- DCモータ DRV8833 プログラム
- まとめ
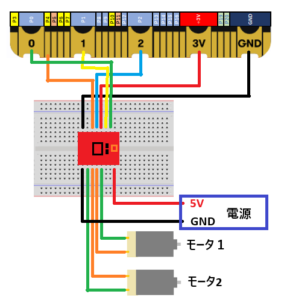
DCモータ DRV8833を使用し2秒ごとに正転・逆転を繰り返します。
| モータ1 | モータ2 | モード | ||
| AO1 | AO2 | BO1 | BO2 | |
| L | L | L | L | 停止 |
| H | L | H | L | 正転 |
| L | H | L | H | 逆転 |
| H | H | H | H | ブレーキ |
出力 1 → H
0 → L になります。
停止 : 電気を止めることでモータは惰性で止まります。
ブレーキ: 両極に電気を流し強制的に止めます。
ブレーキ: 両極に電気を流し強制的に止めます。

リンク
○ DRV8833は3.3Vの入力信号しかないため、100%の能力は発揮出来ませんが、モータの制御つまり速度をコントロールできるので十分つかえるものだと思います。
〇 micro:bit を 学ぶ上で書籍やWebpageを参考に作っていますが、私なりに噛み砕いて書いているつもりですが、判らない点がありましたら連絡下さい。